
 平台热线
平台热线



工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、高效、环保和安全。
主营ABB、库卡KUKA、安川YASKAWA、发那科FANUC、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口***机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区博园路1333号1栋7层
--------------------------------------------------------------------------------------------------
一章 硬件安装

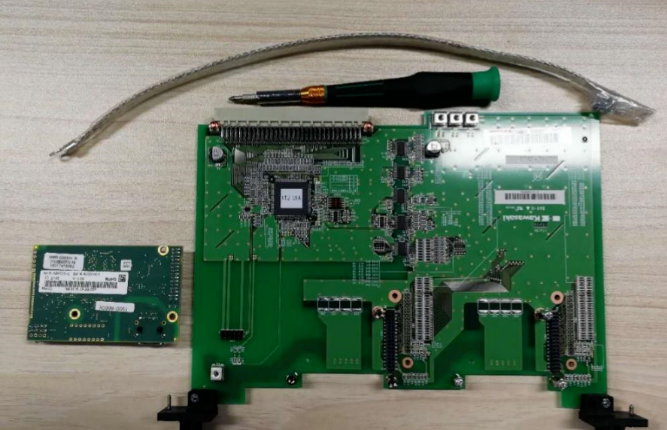
1. 将 PROFINET 从站板卡安装到 1TJ 母板的 CN1 接口,并安装地线
2. 将板卡安装到机器人控制柜内,如果 SOLT1 已经占用就安装到 SOLT2 卡位
3.锁紧板卡固定螺丝
4.锁紧地线螺丝
5.插上网线,网线另一端可以接交换机或者直接插到 PLC网口
第二章 TIA Portal端配置
1.新建工程&添加 PLC(省略),导入 GSD 文件 50999-0061 总线配置文件名为 ABS-PRT(从站)
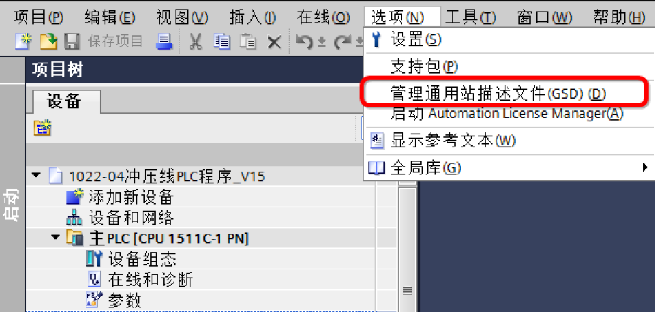
2.打开菜单 选项→管理通用站描述文件(GSD)
3.选择 GSD 文件所在的文件夹
4. 选择 GSDML-V2.0-HMS-ABSPRT-20090204.XML 文件
5.点击安装
6.显示安装已成功完成,点击关闭按钮
8.等待硬件目录更新完成.更新完成后关闭此窗口,GSD 文件安装完毕
9.添加从站设备 (双击左边工程的设备和网络)
10.点击右侧的网络视图,然后打开硬件目录
11.依次打开 其他现场设备→PROFINET IO→General→HMS Industnal Networks→Anybus-S PRT 目录
12.将 RT 拖入左侧网络视图窗口
13.点击添加模块的未分配字样,在弹出的选项中选择对应的网络
14.出现组网线,对接完成
15.添加 PROFINET 的 IO 模块&更改地址,双击添加的 PROFINET 从站设备
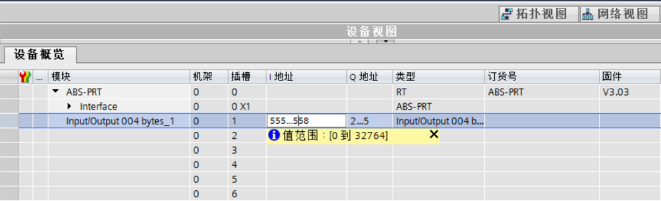
16.在打开的设备视图中,打开右侧的硬件目录,将需要的输入(input),输出 (output)模块拖动到左侧
特别说明:川崎机器人 IO 配置为每组 16 个 IO(1 个 word/2 个 byte),所以拖动的 时候如果是 byte 的话要是 2 的倍数,否则会出现问题. 例如:我们需要和机器人配置 32 个 IN/OUT,那么我们就拖动一个 InputOutput 004 bytes 模块到左侧(8*4=32)
第三章 更改新增模块的起始地址
特别说明:PLC 本身已经占用很多地址,如果从站较多可以将 PLC 不需要的模块 地址更改为靠后的地址
1.如果提示地址占用我们可以将主 PLC 的地址更改为高位地址,方法与 2.3 部分方法相同
2.通过上面介绍的方法可以添加多个 PROFINET 从站,如下图效果
3.更改从站配置参数,模块添加完成后,我们需要对每个模块的 IP 地址,设备名,设备编号进行更 改,并且不允许重复
通过上面的红色标记,打开对应从站的配置列表
4.更改 IP 地址配置参数,设备名,设备编号
比如主 PLC 的 IP 地址为192.168.127.114
那么从站配置参数依次为:
192.168.127.117;robot1;1
192.168.127.118;robot2;2
192.168.127.119;robot3;3
5.将编译好的工程下载到 PLC 中(内容省略)
第四章 机器人总线配置
总线功能的开启
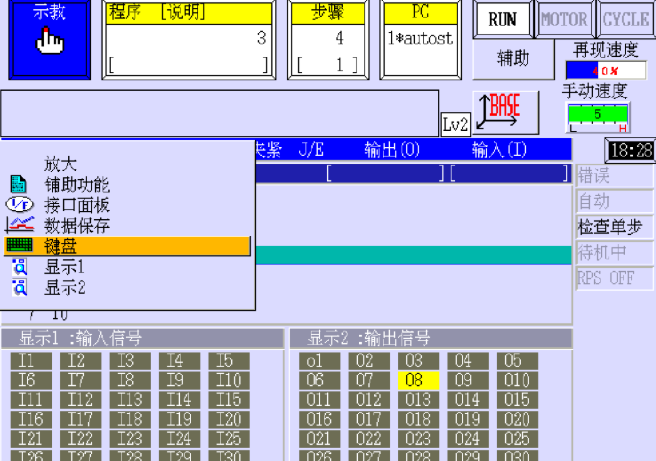
1.机器人开机,打开键盘页
2. 输入指令 z9894,并回车确认
3.提示维护指令 OFF 输入 1,并回车确认
4.输入 zoption_12,回车键确认(两次)
5.当出现通用现场总线 IO 时,输入 1,回车确认(如果现状为 0FF)
6.会提示参数已更改,不用理会,点击关闭按钮
7. 继续按回车键,直到出现$符号,R 键关闭键盘窗口
8.PROFINET 信号的配置,进入 I/O 信号数设定(R 代码 611)
9. 将从信号数改为 32(具体以 PLC 侧配置对应的 IO 数为准),登陆键确认
10.进入 PROFInet Set(R 代码 60807)
11.选择从口,然后点击文字输入
12.输入上面我们在 2.4.2 中设定的 PROFINET 设备名称(回车键确认)
13.登陆键确认,显示设定完毕,退出此界面
14.进入信号配置设置(R 代码 60801),根据需要配置信号,登陆键确认
1.LOC 指的是本地站(机器人自带的 IO 板)
2.SLA 指的是从站(我们新增的总线板卡)
3.通道指的是 IO 的起始地址(低位到高位顺序)
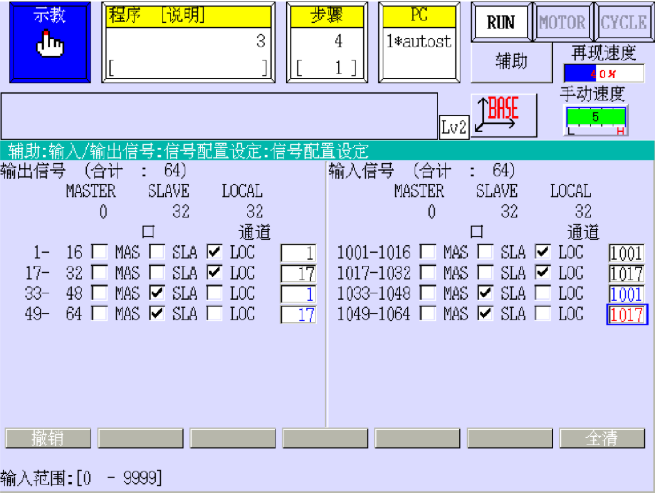
15.检查信号列顺序设定,此配置影响 IO 对应顺序,非必要无需修改(保持默认即可)
16.检查 I/O 物理接口分配
第五章 操作要点
1.PROFINET 网络上设备名称禁止重复!
2.TIA Portal 侧从站 IP 地址必须与主 PLC 的 IP 在同一网段且不得重复
3.TIA Portal 侧与机器人侧的设备名称设置必须一致
全部完成后 TIA Portal 切换到在线状态,检查是否有错误,机器人控制器侧总线板卡两个绿灯常亮,一个绿灯闪烁。
所需工具:
1. 十字螺丝刀一把(中号)
2. 1TJ 板卡(PROFINET 板卡的母板)*1
3. PROFINET 板卡(从站板卡)*1
4. 配套接地线*1
5. 工业级网线一根(六类带屏蔽)
了解更多川崎机器人 焊接机器人 搬运机器人 码垛机器人 kawasaki机器人